
It's necessary to obtain the transfer function of a process which is desired to be controlled, on the case of the present station it was not possible to obtain an accurate transfer function since it does not count with the necessary graphing tools, and the oscilloscope in the laboratory can't save data on modern devices. So an approximation to the transfer function was obtained by measuring the time it takes for the tank to be filled and comparing time vs water level (figure 8, table 3).
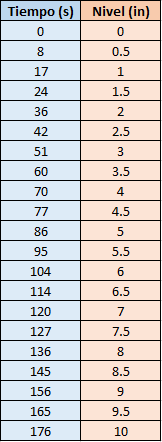
Table 3. Time vs Level.
|

Figure 8. level vs time graph
|
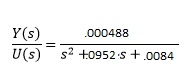
According to the water level vs time graph, the transfer function was obtained considering that the slope represents the gain of k=0.0576. The transfer function was obtained also considering that the system will stabilize when ts=2T with a maximum overshoot of 15%. The function obtained was:
The closed loop diagram in order to obtain the PID values is shown below:
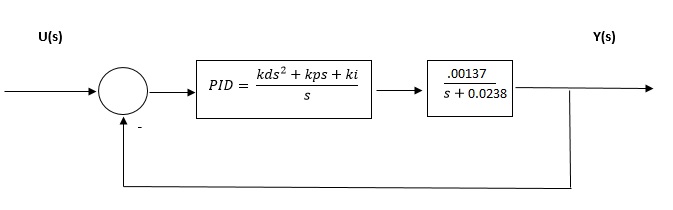
Later on, the parameters of the PID were obtained applying the feedback law and the second order system:
Kd=0 Kp= 52.116 Ki=6.96
Kd=0 Kp= 52.116 Ki=6.96
